
乐鱼体育平台网页版


车路协同、智慧公路的发展和思考
来源:乐鱼体育平台网页版 发布时间:2024-01-02 08:00:04
为什么要做车路协同?车路协同的最初起源其实就是交通,要解决交通的问题,什么样的问题?核心还是安全和效率。因为交通就要完成人和货物的运输,安全和效率是永远的追求。
车辆安全技术起源是从车的角度来做的,最开始是被动安全,逐渐产生主动安全需求。有了车路协同以后,我们提出“协同安全”。被动安全和主动安全,核心都是靠车辆自身技术实现避撞。
举两个例子,一个交通事故发生时天气不是很恶劣,但地面有薄冰。前方有一个事故造成道路堵塞,有人从车上下来查看事故,当场被撞飞。所以有事故绝对不可以上路去做诱导,出现事故赶紧往路边撤离,以防止后续不断有车因为刹车不及发生连续撞击。
第二个是恶劣天气情况下发生的交通事故。一个大货车在行驶过程中因为大雾,看不清、看不远前方路况,可视距离内看到前方事故了,但仍然停不住,货车直接拍了上去,整个驾驶台都拍没了。
两个事故,都是在不太好的天气条件下发生的。这种事故无论是车辆的主动安全和被动安全都很难解决,显然这样的事故还会在发生。
还有一个典型事故,车辆在转弯时尤其是山区公路上转弯时,有视野盲区。在转弯时,因为看不清路况,一辆行驶中的汽车与骑自行车的人相撞。
公路交通的安全问题很多,重点在哪里呢?连环追尾、重特大事故发生后的二次事故,以及恶劣天气下的事故。
道路交通有很多管控方式,管控的难点在哪里呢?首先,道路的通行车辆数量远大于设计的通行能力。举个公路交通管控的典型案例:原本三个车道正常通行,但有一个车道发生了事故或维修,导致没办法通行,理论上通行能力只降低了三分之一。但实际上,当通行车辆远小于设计通行能力时,对通行的影响并没有显现,但车辆增多后,事故点前方位置由于换道加塞、速度变化,通行能力将急剧下降,如果车辆数量接近设计能力或者大于设计能力时,拥堵就不可避免,通行能力急剧下降。
恶劣天气下的封路和限行。四川高速同行最近在探索全天候通行,能不能不封路,或者能不能少封路?
可以通过车路协同掌握基础数据,然后交互基础数据,在基础数据的基础上再去做过程应用。现在交通部在推进交通基础设施数字化,就是往这个方向走。先把静态数据数字化了,作为交通数据交互的基础和平台,再把动态数据数字化了,再把交互数据实时化了。在这个基础上再去做应用,包括交通安全、交通效率、交通服务等应用都可以做。
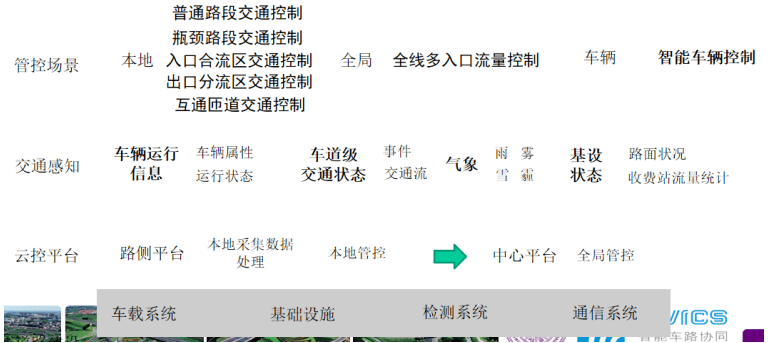
车路协同可以做什么?一是检测,二是交互,三是管控。检测有两个层面,一是道路本身的感知检验测试能力要补强,如流量、速度,因为在车路协同环境下一定是要检测每一台车辆的状态。如位置、速度、方向、状态等动态数据,不仅仅是统计数据而已。数据有两个来源,一是从车辆来,车辆报送给系统,再实时交互给其他的车和路侧设备,二是路侧设备把每辆车的状态检测出来。二是交互,这个交互和传统交互略有不同。传统智能交通是把数据送到中心,再通过处理后下发,比如刚才刚播放的视频中那个连续撞车事故,等送到中心再发下来,再做车辆控制,就没什么意义了,因为延时。车路协同的数据交互一定是实时的数据交互,毫秒时间内把道路交互与通行状态交互给周边车辆,即300~500米内跟安全相关的车辆,如果不交互,就和传统的后台数据处理是一模一样的,对预防二次事故发生就起不到作用。当然,实时要求可以低一点,有低延时高可靠的直联通讯,做全局大交互,比如LTE-V的PC5和5G的New radio。
有数据了,有交互了,有共享了,下一步就要做管控。管控手段有很多,跟智慧公路有关的管控叫主动管控。传统的公路交通管控是用道路的基础设施来实现,如诱导、关闭车道等,这是被动管控。而主动管控中,车辆本身也是个控制变量,可参与到管控当中去,管控手段包括主动避撞,主动交通控制和全天候通行。主动避撞能轻松实现车车交互,车辆交换安全和状态信息,恶劣天气和密集交通环境预警,避免连环撞击。在特殊道路环境下,如匝道、弯道、隧道提供驾驶员盲区预警,避免碰撞。
这就是针对前文所举问题里面的场景,给驾驶员提供实时预警服务,交互方式多种,信息可以推到智能网联车上,若不是智能车,可以用可变情报板/诱导屏,或者交通广播、行车记录仪等,想办法推到车上,让驾驶员知道相关信息。
典型应用:交通主动控制。如何正确地处理?例如长沙市福元路大桥,往南一点是湘江二桥。要从长望路上桥,从西往东是6条车道汇聚到路口,如果不做控制,就会成为一个“死塘”。6条车道的车要挤到两条车道里面去,交警怎么做?装了6个车道红绿灯,每次放两个车道,目的让桥上保持两条车道的通行能力。这就是它的控制目的。有车路协同后怎么办?交通主动控制、预警,分段车速引导、换道提示,把这三个内容加进去以后让车辆有序的进入,不超过两条车道的正常通行能力。分段车速引导是很有效的方法。
全天候通行。川高特别想做这件事情,要是效果好的话,很有几率会成为下一阶段智慧高速一个突破性的应用,既能解决路侧系统的基础设施建设,也能增加车路协同设备的装车率。只要有足够的装车率,有足够的路侧系统,除了解决全天候通行的问题之外,还能把其他应用全部叠加上去,那就是一个非常快速的方式了,希望可以快速成功。
一是系统继承关系不清楚。传统智能交通管控和协同智能是一个继承关系。车路协同是能够支撑和提升传统智能交通很多能力,也能增加一些新的能力。现在业界经常把两个分开,建设的时候,传统的交通管控(信号、诱导、监控等)和和车路协同分开建设,车路协同就几个场景模拟模拟,这是很大的问题。
二是应用效果不明显。车路协同讲了十年,做了十年了,投了那么多钱,有用吗?没看到用。问题在哪里?因为只是局部道路建设。车路协同要应用,做一条路,做几个路口,做一个小区域,没有用,一定要在一个地方试点做全域。现在住建部试点“双智城市”,选了16个城市来突破。我一直强调,做车路协同就要做全域,哪怕做一个细致划分领域的全域都可以。其次,路端设施要同步车端,路侧系统建好了,但没有车进行匹配。智能驾驶的车何时普及?车企说已确定进入了量产计划了,但量产计划是三年以后才有车。三年?三年以后路侧系统、设备都坏了,没了。
构建道路基础设施,获得信息体系,实现全时空信息实时获取和交互,实现所有道路参与者实时共享。
面向需求逐步提供各类应用。首先要提升现有交通管控能力,如数据收集能力,应急管理反应能力。增加现有交通管控系统还不能提供的一些应用,比方车道级控制、避撞、诱导,这是一个整体思路。
高速公路场景并不复杂。有主线收收费站、服务区、隧道区,有匝道出入口,施工区,救援区,事故拥堵区等。
全域一定不是全道路覆盖,300年没拥堵、没事故的地方真没有必要做。为了节省本金,只在有事的地方做,这叫全域。
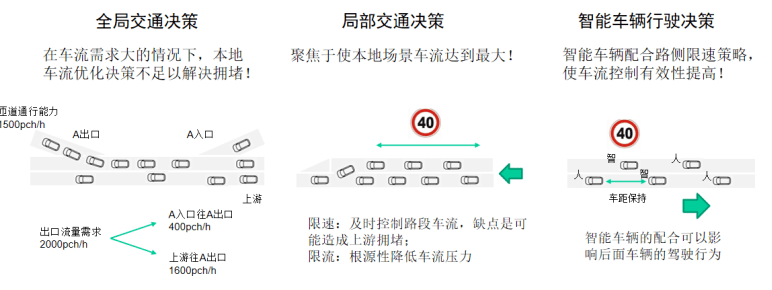
那做什么?要有路侧、中心、车端,在没有车端设备的时候要有过渡方案来处理。远端,决策级引导,分流引导,收费限流等应用;近端,引导级控制,异常路段上游可变限速控制,车道选择引导;本地做引导及预警,合流区预警,车辆超速预警,以及速度引导等。
(图)这是一个路网模型,把所有点全部做清楚了以后,我觉得高速公路通行能力能有非常好的提升。
车路协同能轻松实现现有交通安全提升,包括车辆被动安全,主动安全。我们叫做协同智能,这可能是交通安全方面的革命,当然也是无人驾驶的一条实现路径。将来无人驾驶真的实现了,肯定少不了车路协同技术。车路协同是新一代智能交通系统的基础,能更细致地获取每个交通独立对象的数据,并共享起来,把交通从被动控制变成主动控制,车辆本身运行也参与到这个控制中间,也是一个大的交通技术革命。
注:本文为清华大学自动化系教授姚丹亚在第十六届中国智能交通年会——智慧公路论坛上发布的演讲摘要,未经本人审定。
声明:本文由入驻搜狐公众平台的作者撰写,除搜狐官方账号外,观点仅代表作者本人,不代表搜狐立场。